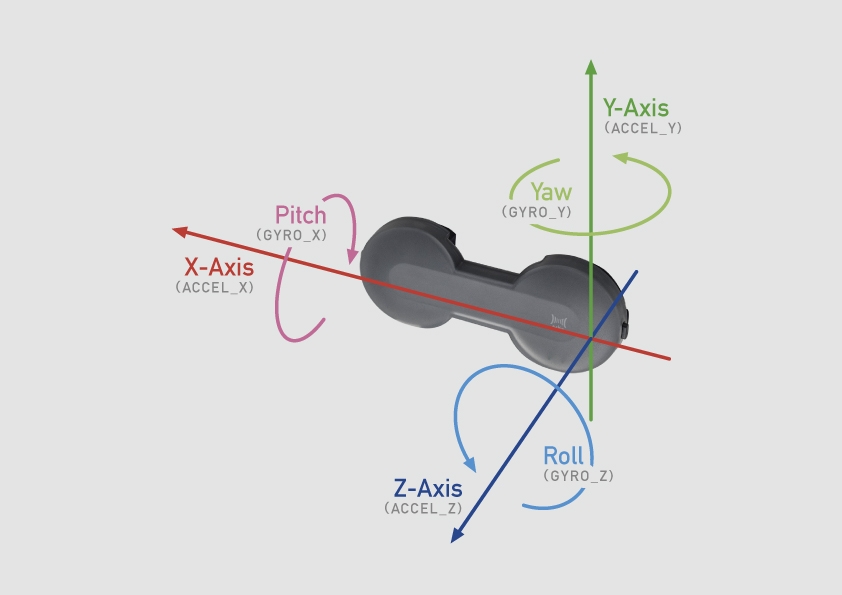
The accelerometer in the Hub uses a left-handed Cartesian coordinate system.
The origin of the system is set on the left part because the IMU module is mounted in.
The y-axis is vertical along with positive values increasing upwards.
When a user vertically stands with the e-skin Hub, the gravity appears as a negative value in the y-axis accelerometer.
The x- and z-axes lie in the horizontal plane, with the x-axis running parallel to the bridge between the left and right parts.
Each gyro sensor channel measures the rotation around one of the axes.
The orientations of the rotations are defined by the right-hand rule.
For instance, the y-component of the gyro sensor, which is generally known as yaw, is the rotation around the y-axis.
The x- and z-components correspond to pitch and roll, respectively.